
CAXA 3D工程模式设计案例-AGV智能搬运机器人
CAXA 3D 实体设计软件作为北京数码大方科技股份有限公司(CAXA)的三维CAD 产品,经过三十多年的不断打磨,已成为国内领先的、优秀的、得到广大工程师认可的三维设计软件。在实体设计中既有自由拖拽的创新设计模式,又有严谨的参数化设计的工程设计模式,以满足不同用户的需求。为了方便有其它3D 软件如SolidWorks、Creo、UG、Catia等使用经验的工程师轻松使用CAXA 3D,本教程案例是全部使用工程模式进行设计的。
如需获取本教程完整版,请邮件联系wang_chao@caxa.com
高速下载
适用人群
工业设计人员
课程概述
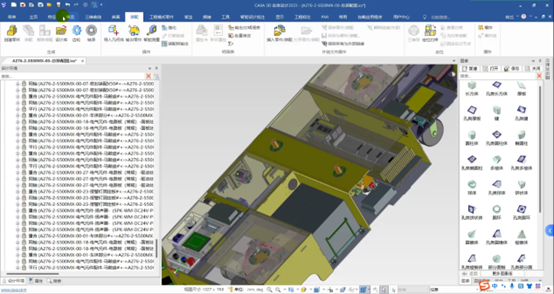
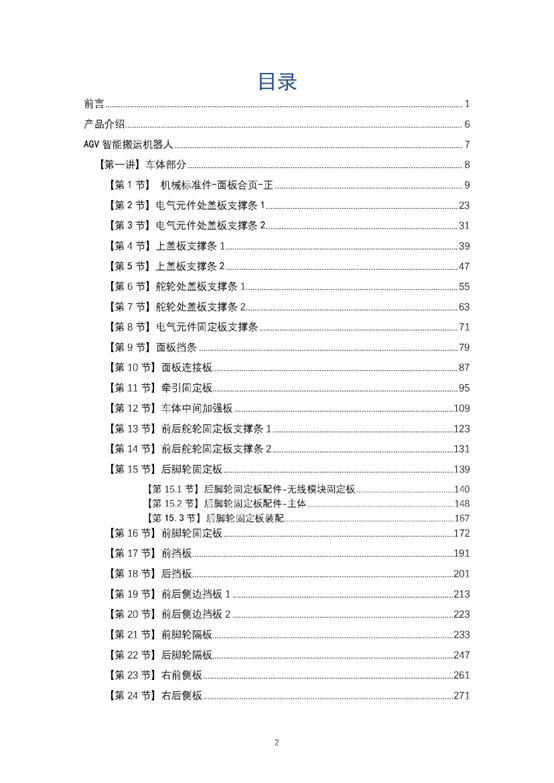
我们挑选某品牌AGV 智能搬运机器人作为设计案例,采用工程设计模式、真数据、全尺寸、进行绘制,从零件设计到装配设计、全过程录屏展示应用实体设计的过程。同时提供设计案例文档、源文件、视频文件。本手册中详细描述了设计过程,包括具体的尺寸参数;录屏文件中配以简单的文字说明;并提供源文件,可以给用户直接使用,也可以编辑、修改
CAXA 3D 实体设计工程模式采用的全参数化设计模式,符合传统3D 软件的操作习惯和设计思想,通过参数化驱动模型可使得非标设计难度大大降低。用户可通过输入参数便可实现产品的变形设计。实体设计工程模式存在以下的特点:数据之间建立严格的逻辑关系,同时具有父子依赖关系,修改某特征后,其依赖的特征也会发生相应的变化。工程模式下绘制的零件在设计树上可进行回滚,对零件绘制过程进行溯源。对于参考设计具有很大的帮助作用。工程模式中存在基准面、多体的设计概念,类同于市场上传统的同类软件的操作。切换到实体设计时,可实现操作建模体验的无感切换与无缝对接。
产品介绍:
AGV(Automated Guided Vehicle,简称AGV)智能搬运机器人是 指装备有电磁或光学等自动导引装置,能够沿规定的路径行驶,并且按照设定的指导路径前行规避,具有安全保护以及各种移载功能的运输车。AGV 智能搬运机器人是可实现货物快速搬运的设备,同时可根据货架的高低调节高度,物料可以直接放置在料架上,AGV 智能搬运机器人系统可以自动驶入料架底部搬运至员工处理区,无需人工操作,即可实现货物的快速搬运动作。它使企业减少大量劳动力,提高工作效率,可有效的节约人工成本和时间成本。在工业企业转型升级、智能制造过程中,为企业实现物流系统智能化、提高生产效率等方面提供很好的解决方案。
AGV 智能搬运机器人的基本构成包括车体、蓄电池和充电置、驱动 装置、转向装置、车上控制器、通信装置、安全保护装置、移载装置、信息传输与处理装置。AGV 智能搬运机器人的结构设计覆盖了电子电器、机械等各行业应用,具有机电一体化的典型特点。同时具有自动化程度高、充电自动化、柔性好、自动化和智能化程度高等特点。

请关注
CAXA微信公众号


请关注
CAXA微信服务号




